We remain fully operational. Our teams are working around the clock to ensure your deliveries continue safely.

下载应用程序










🔥 Upgrade your 3D printing game with smart precision and fail-safe power! ⚡
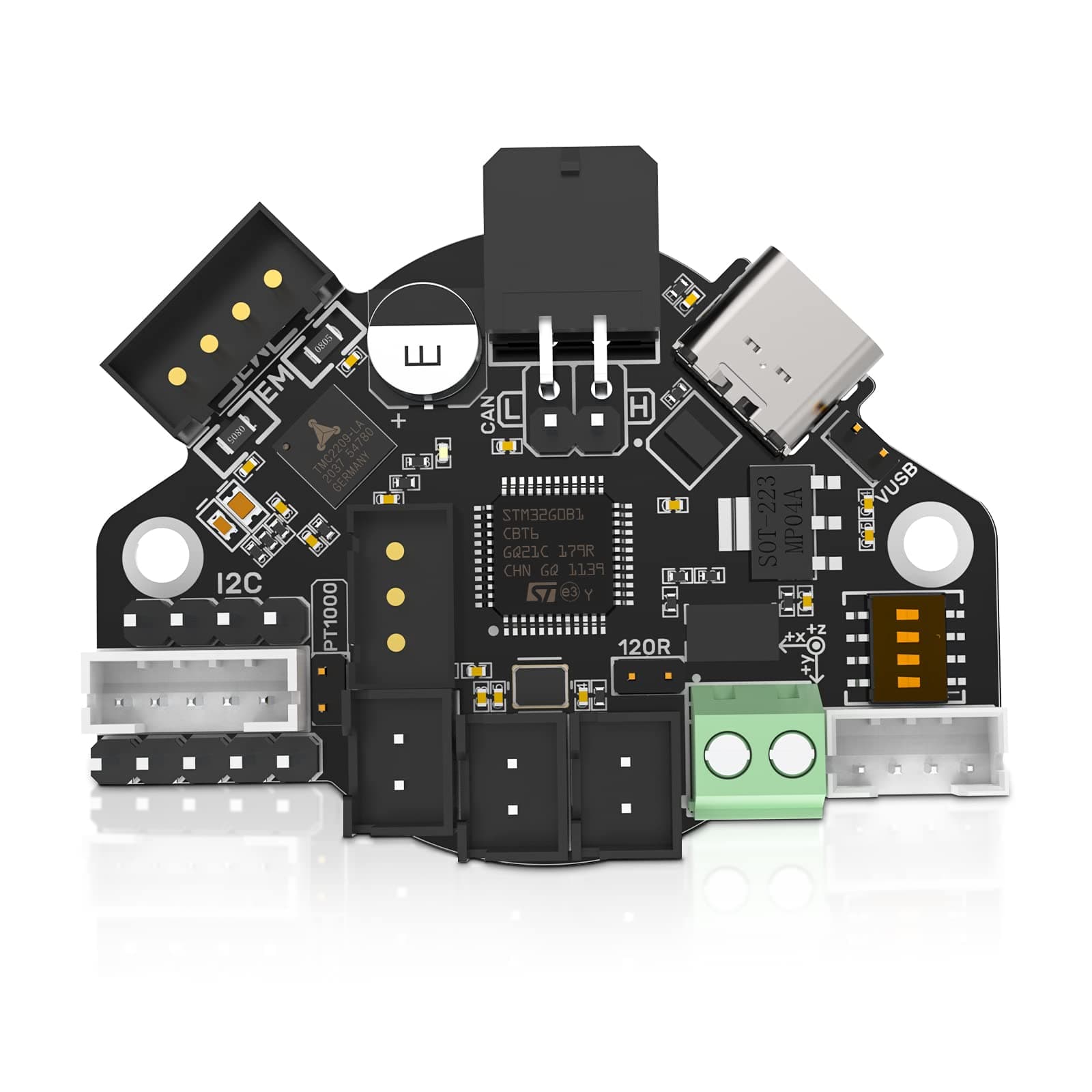
The BIQU EBB36 CAN Bus Adapter Board is a compact, high-performance extruder controller designed for 36-stepper motors, featuring onboard MAX31865 for precise PT100/PT1000 temperature sensing, dual CAN/USB communication, and advanced safety protections. Its rich expansion ports and firmware update capabilities make it the ultimate upgrade for Ender 3 and BLV printers, delivering reliable, customizable, and future-proof 3D printing performance.






















| ASIN | B0B1MGSCDV |
| Batteries required | No |
| Customer Reviews | 4.5 4.5 out of 5 stars (65) |
| Date First Available | 27 May 2022 |
| Included components | NO |
| Item model number | 1020000370 |
| Package Dimensions | 9.7 x 5.79 x 3.71 cm; 32 g |
J**G
Performs like you would expect from the board. I had no issues with the EBB36.
C**.
I would give this board 5 stars if I didn't have to crimp JST-PH 2.0 connectors to use the MAX sensor or the 5 pin homing sensor. I understand there are very tight restraints on a board this small, although it would be nice if JST-XH could be used for those connectors instead. Getting CAN set up on this board was a breeze.
R**Y
Great CAN board and you don't have to wait for it. Just follow the online instructions and you be all set.
C**W
For my Zero G Mercury One CoreXY build it was my ambition to run CANBUS to my print head, primarily to avoid having to install a thick umbilical to provide the discrete sensor and control data. This solution by BigTreeTech pairs nicely with my Manta M8P mainboard which already has CANBUS IO. In addition, I selected the EBB36 version as I was running a pancake Nema 14 stepper motor. The difficulties I had included flashing the right Klipper firmware to both boards, and then the power-up sequence to get them to recognize one another on the CANBUS and "shake hands". KB3D Wiki is a great resource in getting this working. Ultimately, it took several attempts before I got a stable and consistent connection between the two boards, but it now works. Many argue that the accelerometer data generated by input shaping needs high bandwidth to calculate a good result, but I have noticed that running your CANBUS on 500k bus speed is sufficient for all your needs. I would also caution you to provide proper strain relief for the umbilical so that you don't pull the connector from the solder pads on the board. Still highly recommended! But setup is not for the faint of heart!
D**S
BE VARY CAREFUL WIRING THE CAN BUS CONNECTOR!! The wiring diagram is very vague and misleading. Find a YouTube video to show you how to do it properly. As you will hear from many of the videos, it is extremely easy to misinterpret the CAN bus connector wiring and fry your board. This is a know issue to BigTree, and while they seem perfectly capable of rushing new hardware to the market to sell you, they are EXTREMELY lacking in documentation, addressing known issues, and customer support for it!.....For the record, I wired my correctly, but only because of the warnings and work of others unassociated with BigTreeTech! In my opinion, this is a company that is much more interested in selling you something than it is in supporting what you've bought! They are happy to leave that part to the community and consumers to figure out for them!!